After the last blog post I had a meeting with Birgit Bachler where we talked about the topic. I presented some of my ideas and got useful feedback. Based on the feedback received and my assessment of the potential and feasibility of each idea, I decided on the concept I wanted to further develop.
THE FINAL IDEA
The final concept I landed on is creating a second-hand app for children’s shoes. There are multiple second-hand apps on the market, but there are none dedicated for children’s shoes. I focus on this user group because children continuously grow, and so their shoe size is constantly changing and there is a rapid change of shoes. There are for that reason a big potential for second-hand children’s shoes. This approach is not only more sustainable, but also cheaper. After discussing the idea with Bachler, we concluded that second-hand children’s shoes might be more acceptable than adult shoes, given the different hygiene concerns associated with used footwear. Another advantage of a second-hand app dedicated to shoes is that it might be easier to find the exact type of shoe that you are looking for, being able to filter on different shoe types.
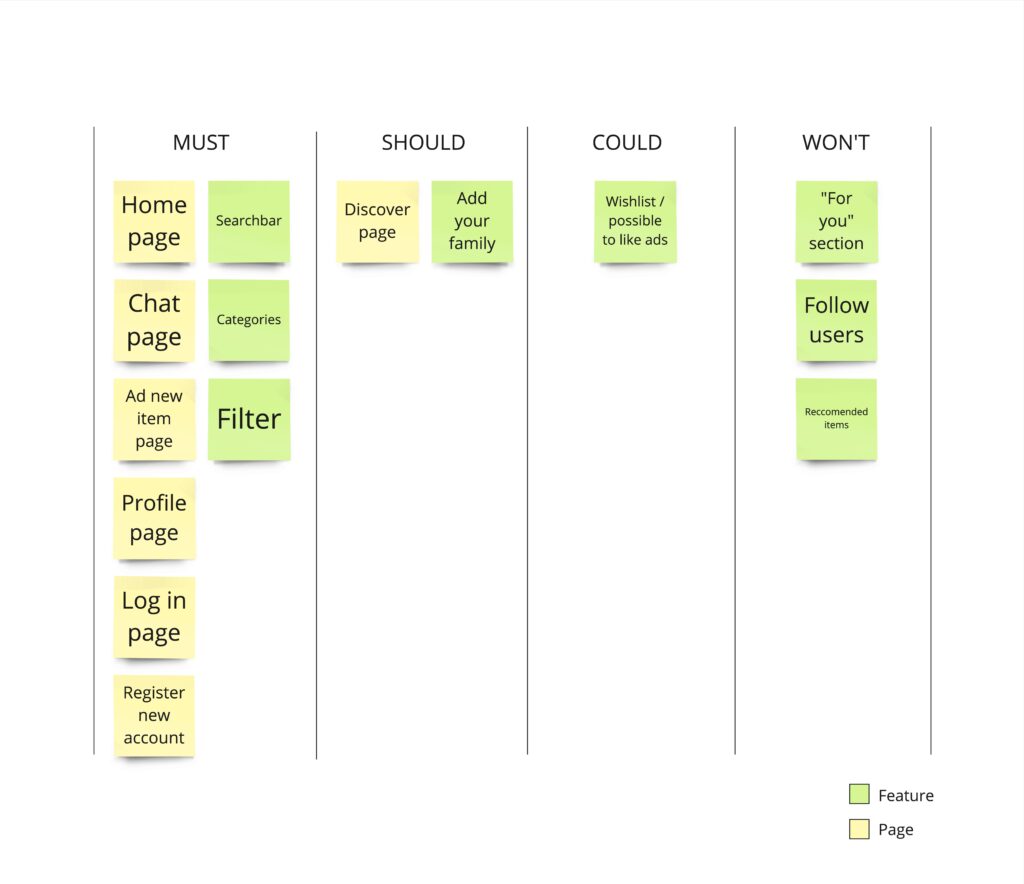
After deciding on the concept, I started thinking about what features this app should contain and I searched for inspiration from other second-hans apps. I created a MoSCoW list to arrange the different features in order to help me decide on what was the most important ones and what I did not need.
PAPER PROTOTYPE
After getting a more defined vision of what the app should contain I started to create paper prototypes. First I quickly sketched the different pages of the app and then I made some more detailed screens. The app is in many ways pretty similar to other second-hand apps, but there are some features that stand out, for example the option to add children to your profile so that you can easily find shoes that matches their size and preferences.
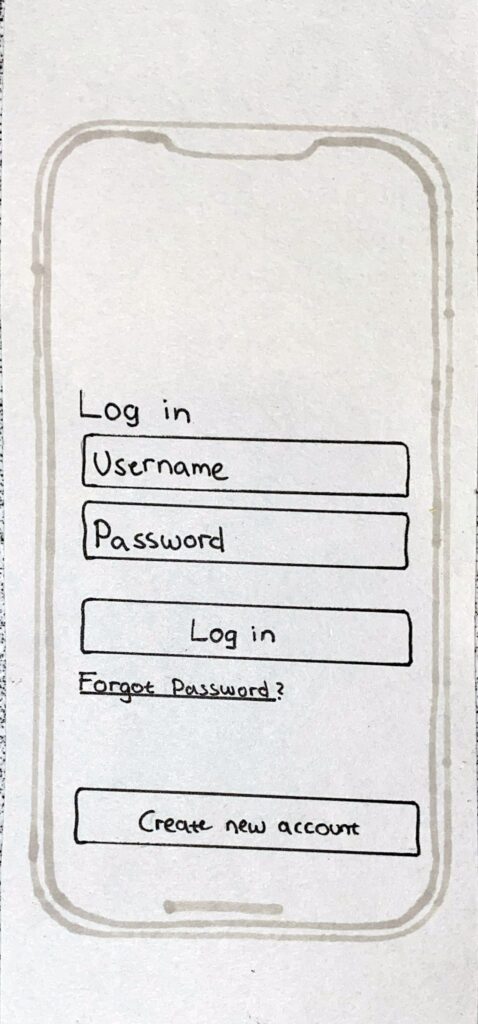
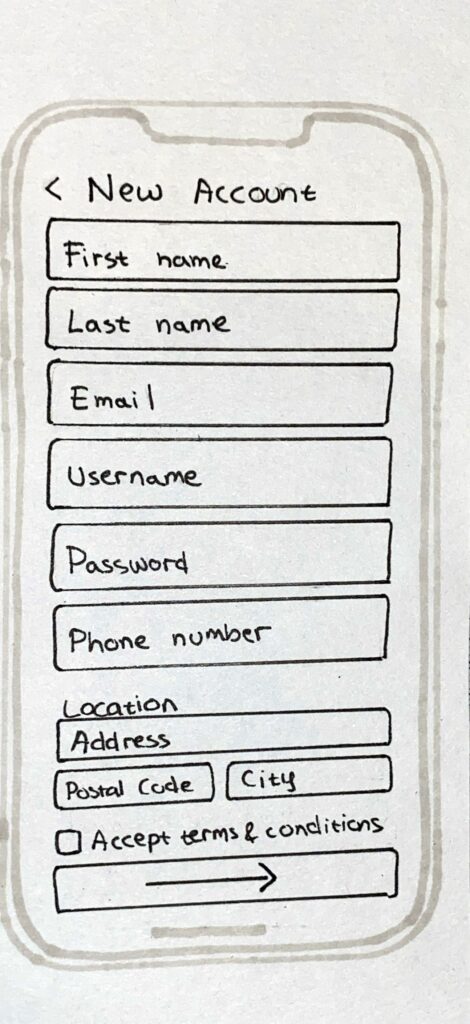
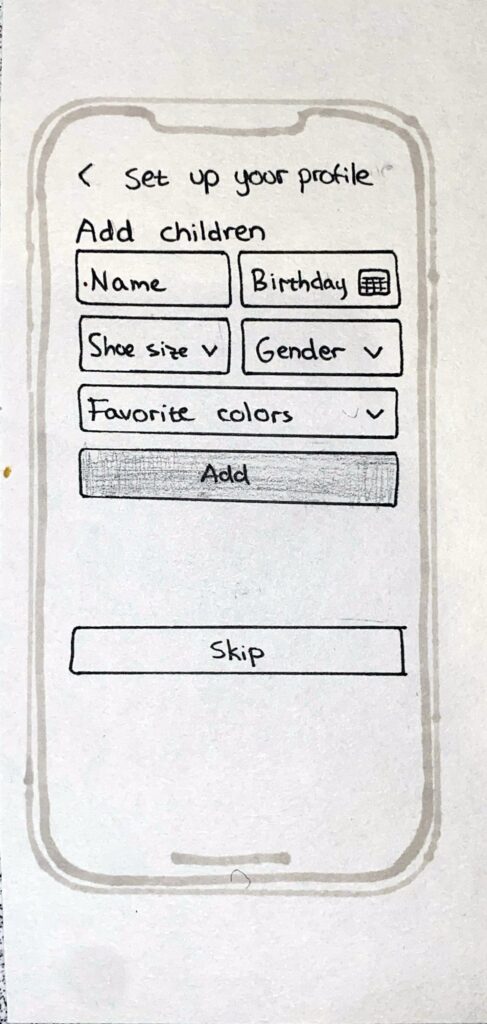
Log in & Create new account
The log in page and the create new account page are pretty straight forward. When creating a new account, the information that are necessary for the app is asked from the user. The user can also add children when setting up their profile so that they can more easily find shoes for them.
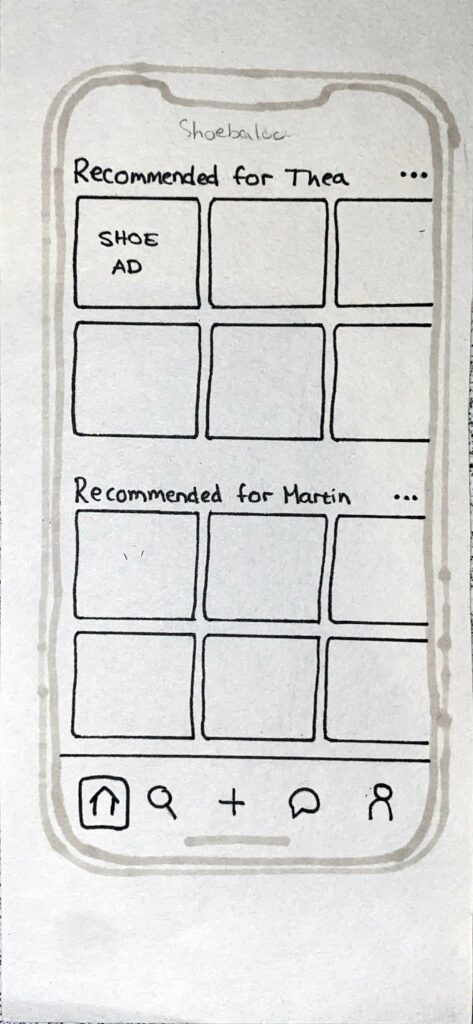
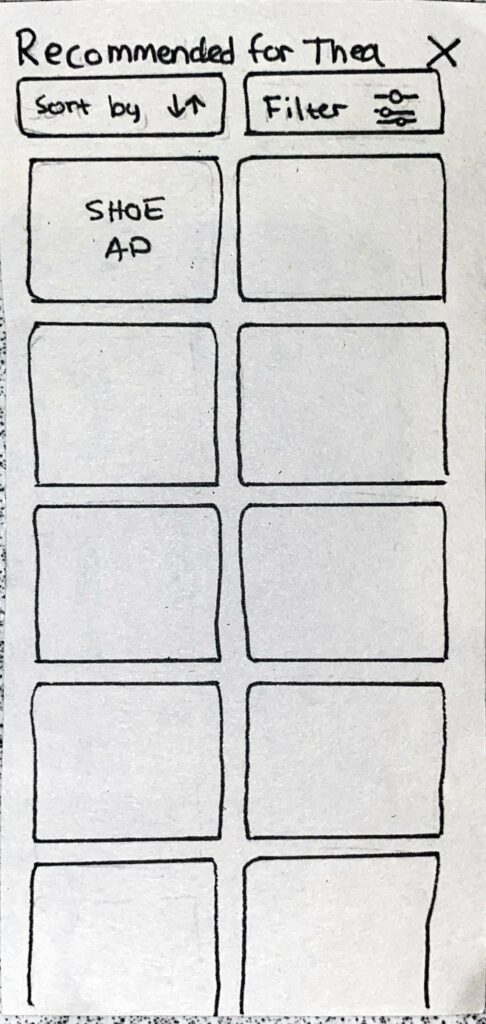
Home page & Ad page
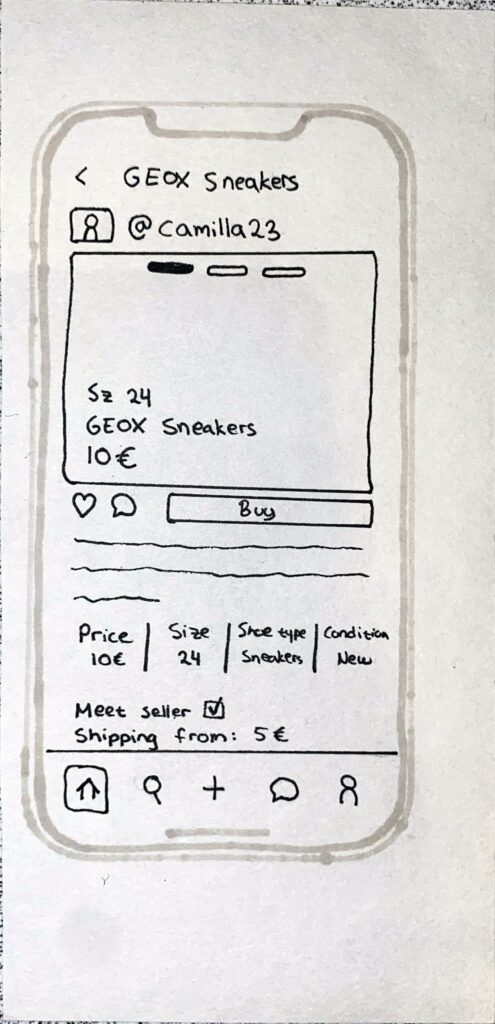
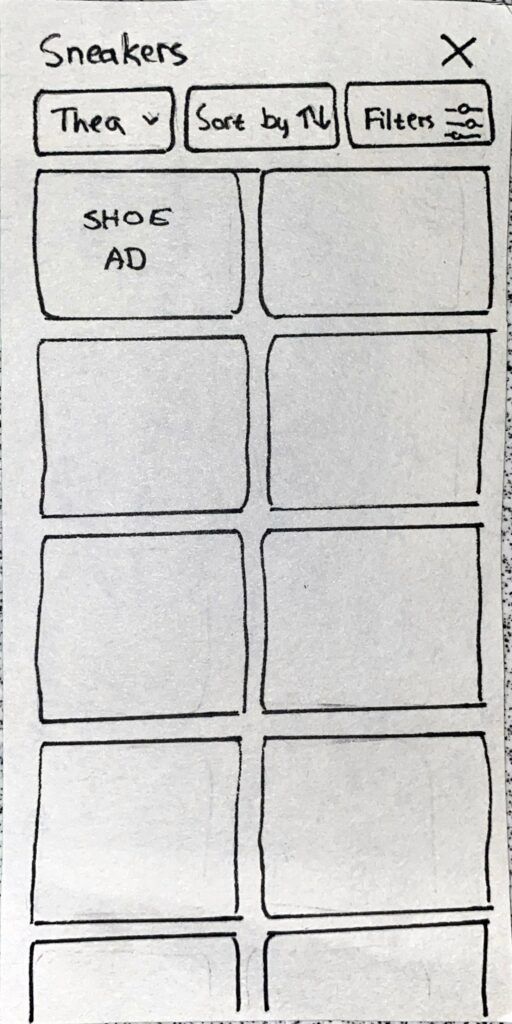
In the home page, shoes recommended for the registered children are displayed. If there are no registered children, the shoes that are displayed will either be shoes recommended based on the previous purchases or shoes that are popular in the app. It is also possible to click on recommended sections for each child in order to get a more detailed view with possibilities to sort and filter (middle picture). When an ad is clicked on, a page with more details about the shoes will be displayed (right picture).
Explore
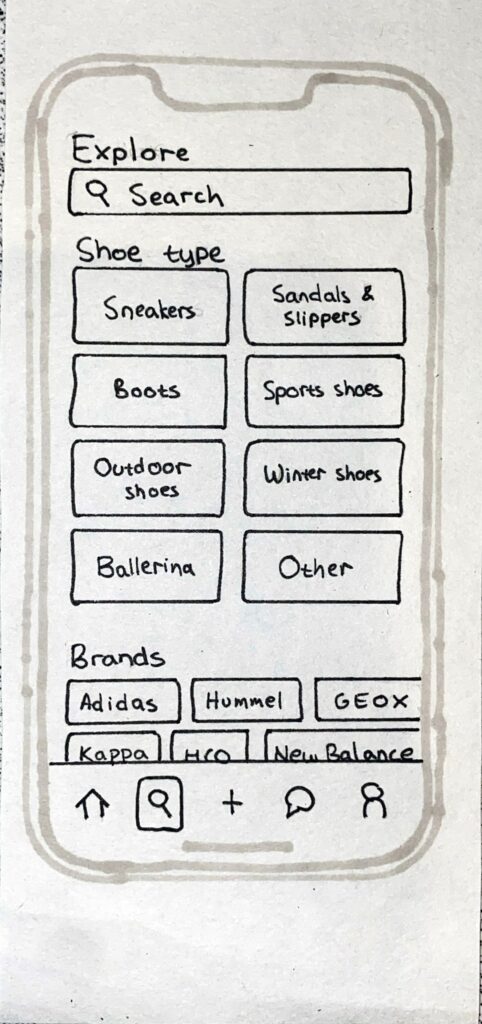
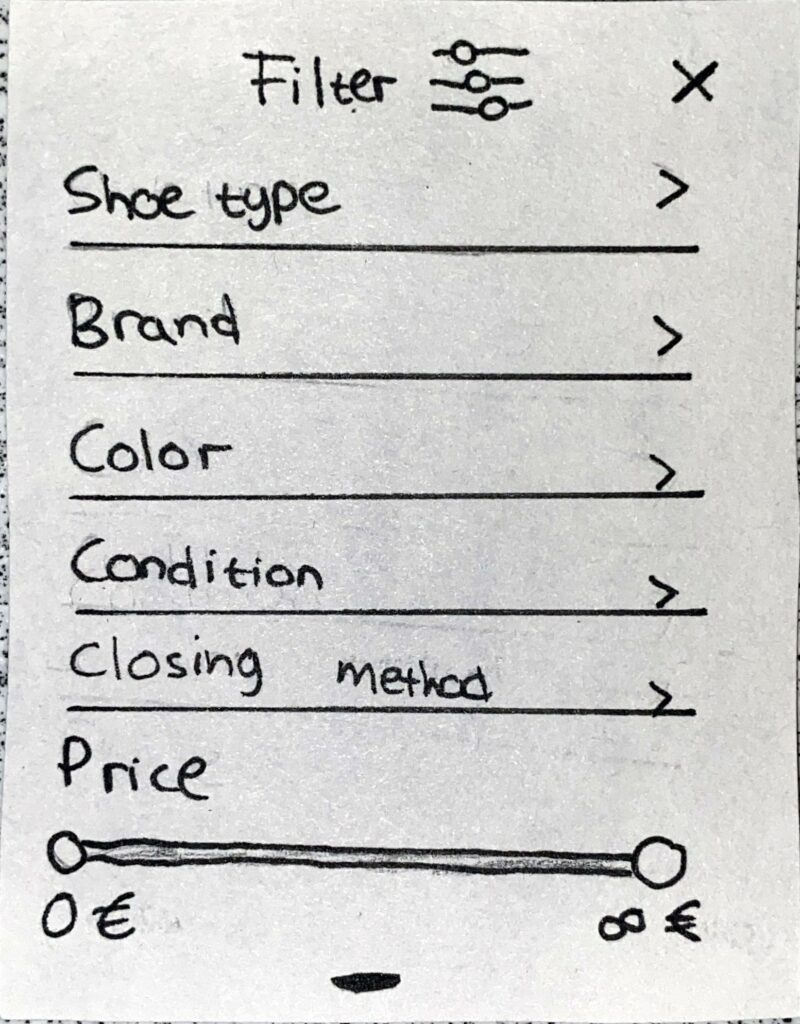
In the explore page, it is possible to search for specific tags, browse shoes based on shoe type and based on shoe brand. When browsing shoes in this section there is an additional filter option where the user can choose which child they are looking for shoes for (second picture from the left).

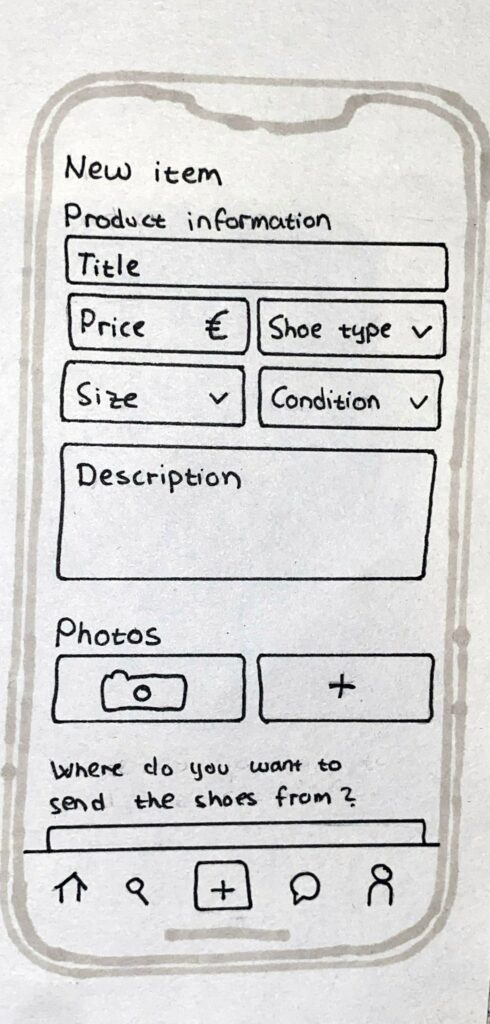
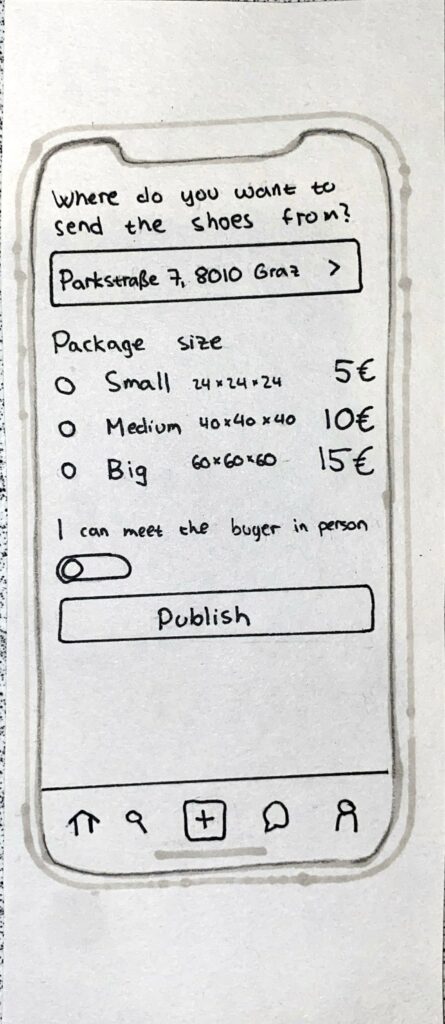
New item
When adding a new shoe for sale, the user must fill out general information about the shoe and add pictures. The user must also decide where to send the shoes from, what package size that is correct and if they are open to meeting the buyer in person or not.
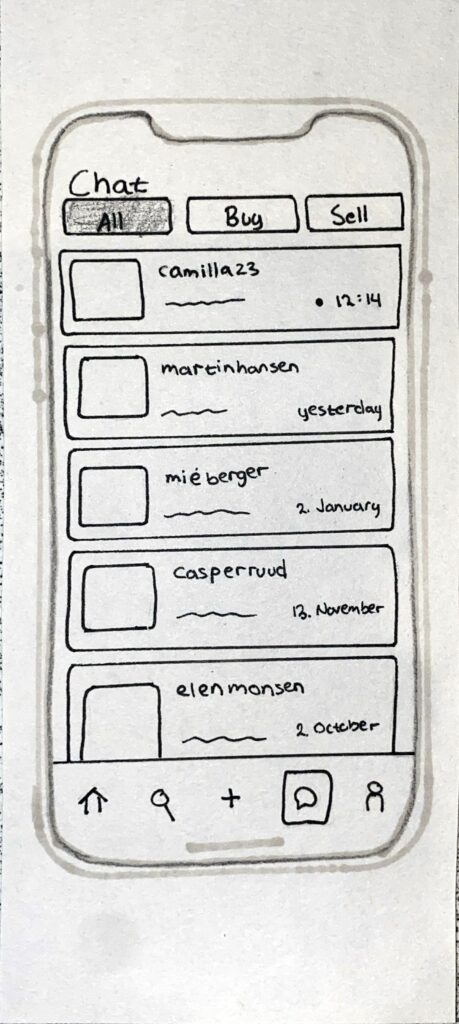
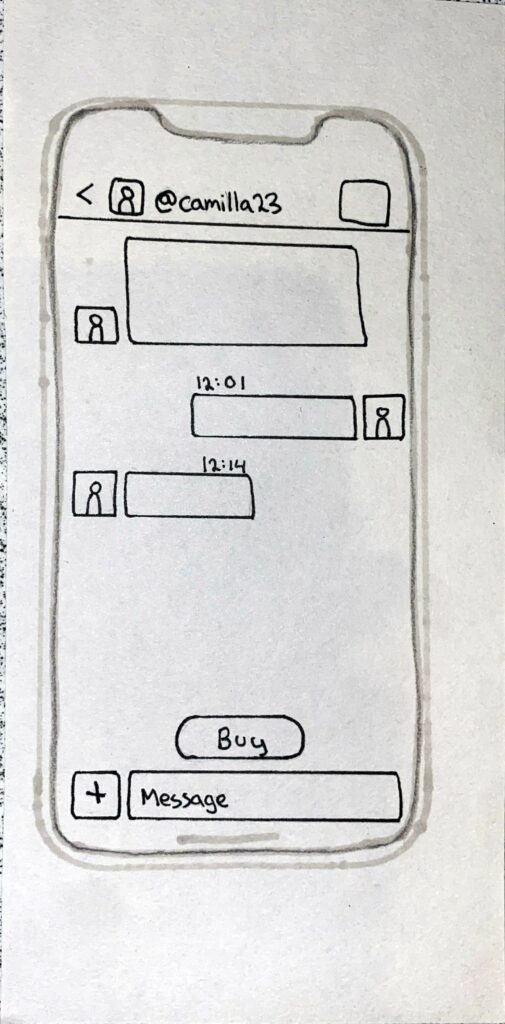
Chat
In the chat page, there is an overview of all the different chats and the user can filter the chats based on if you are buying or selling an item or both.
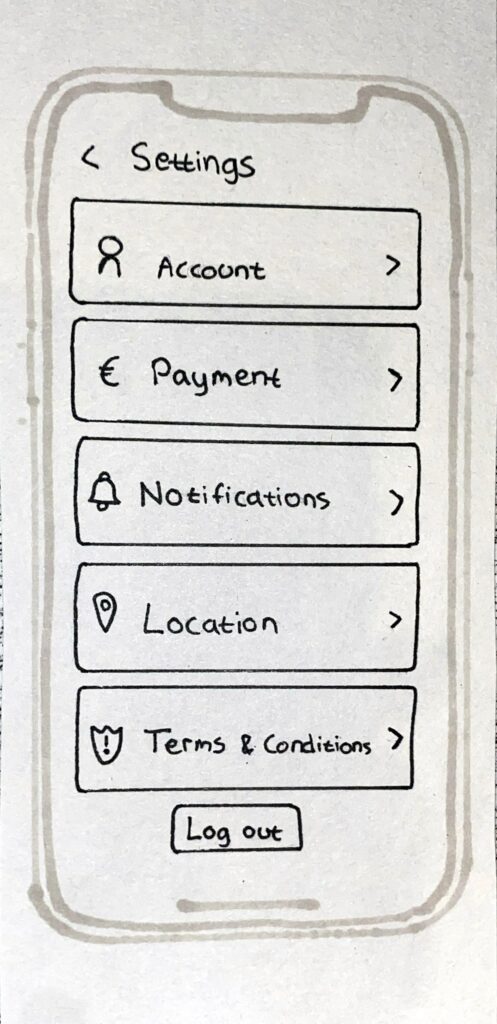
Profile page & Settings
In the profile page there is an overview of the users profile, the children they have added and the shoe ads they have added, but also the shoe ads they have liked. It is possible to change the information about the children by clicking on the frame. The settings page can be reached from the profile page (icon in the upper right corner). In the settings page the user can manage their account and log out.

🩴 🥿 👠 👡 👢 👞 👟 🥾 🩴 🥿 👠 👡 👢 👞 👟 🥾 🩴 🥿 👠 👡 👢 👞 👟 🥾 🩴 🥿 👠 👡 👢 👞