After establishing the connection between the two software programs, an effort was made to understand Wekinator’s three output types in relation to the composition concept and their application within the patches.
All classifiers or classification outputs represent distinct categories such as Position 1, Position 2 and Position 3. It is necessary to specify to Wekinator how many categories to use. Wekinator outputs numbers, such as 1, 2 or 3, corresponding to categories 1, 2, 3. It attempts to categorize each new input provided.
All continuous outputs generate numeric values within a defined range, divided into two types: Real-valued, for example to control smooth changes like any sliders, and Integer-valued, to adjust parameters such as filter cutoff frequency with an integer output.
The third type in Wekinator is Dynamic Time Warping (DTW), which is used to recognize and compare more complex patterns over time. Wekinator sends different output messages for different output types, for instance when it builds numeric or classification models, it computes a set of output values every time it sees a new input, but when Wekinator builds a dynamic time warping model, it continually looks at the input (despite the speed and the duration of them) to see how closely the current shape of the input, matches each of the example shapes or the trained patterns, this means that the random movements will provide no inputs from the Wekinator.
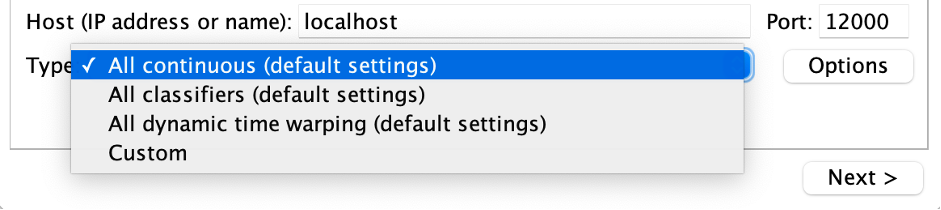
Figure 1. An overview of Wekinator Types in the Software
In my initial attempts, I tried to record multiple examples for each motion and map the DTW to turn on/off different gates and trigger some selected parameters once during the piece. However, after numerous trials it became clear to me that the absolute value of the DTW is not crucial and cannot be effectively mapped to so many distinct parts. As a result, I decided to use an unlatching or momentary switch pedal for this purpose instead.
Later, I decided to utilize DTW for granular synthesis and the chorus section. I assigned different motion patterns to trigger various parts of these effects, ensuring that any misreadings or constant values would not negatively impact the piece. This approach prevents the possibility of silence, as multiple triggers occur in succession based on different movements. To make the process more optimal, I attempted to convert the float output values of the DTW, which typically range from around 3.0 to 13.0, into a single integer state. From the resulting three integer output data streams, I selected the highest or winner value, as it represents the most probable outcome. Additionally, I implemented a timeout mechanism using a gate with a 5-millisecond delay for the on/off cycle. This ensures that the selected winner motion remains active for a short duration, helping to stabilize the output and prevent rapid fluctuations.
As the distinct categories in the classification did not contribute effectively to the compositional process, I decided not to use them for this project. Instead, I focused on working with continuous outputs to manipulate various sections, such as reverb and pitch shift during the piece. But since the outputs were not very smooth, I assumed that the lack of historical data in this type of Wekinator might be the reason, so I considered that providing more past values could lead to more consistent results.
To address this, I mapped the sensors to the DTW and then used 10 data values (7 directly from the sensors and 3 from the DTW outputs) to train another Wekinator for continuous control. Additionally, different port and message names were required for the input and output so that Wekinator could distinguish them from the DTW data.
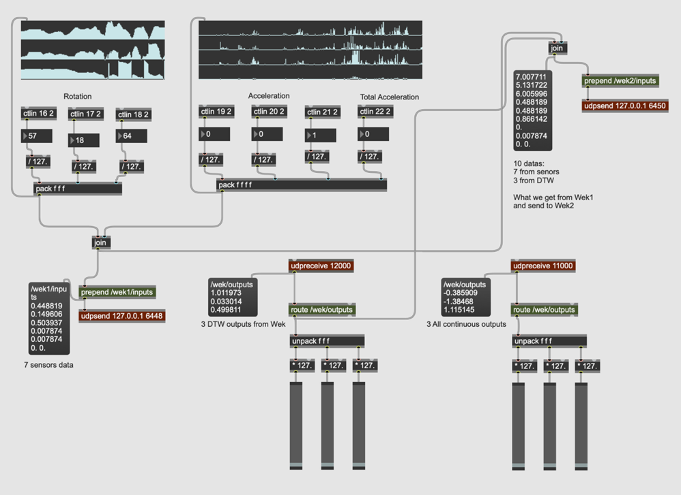
Figure 2. Max MSP Data Exchange and Configuration For DTW and All Continues Data Types